> pip install
eigen-robotics
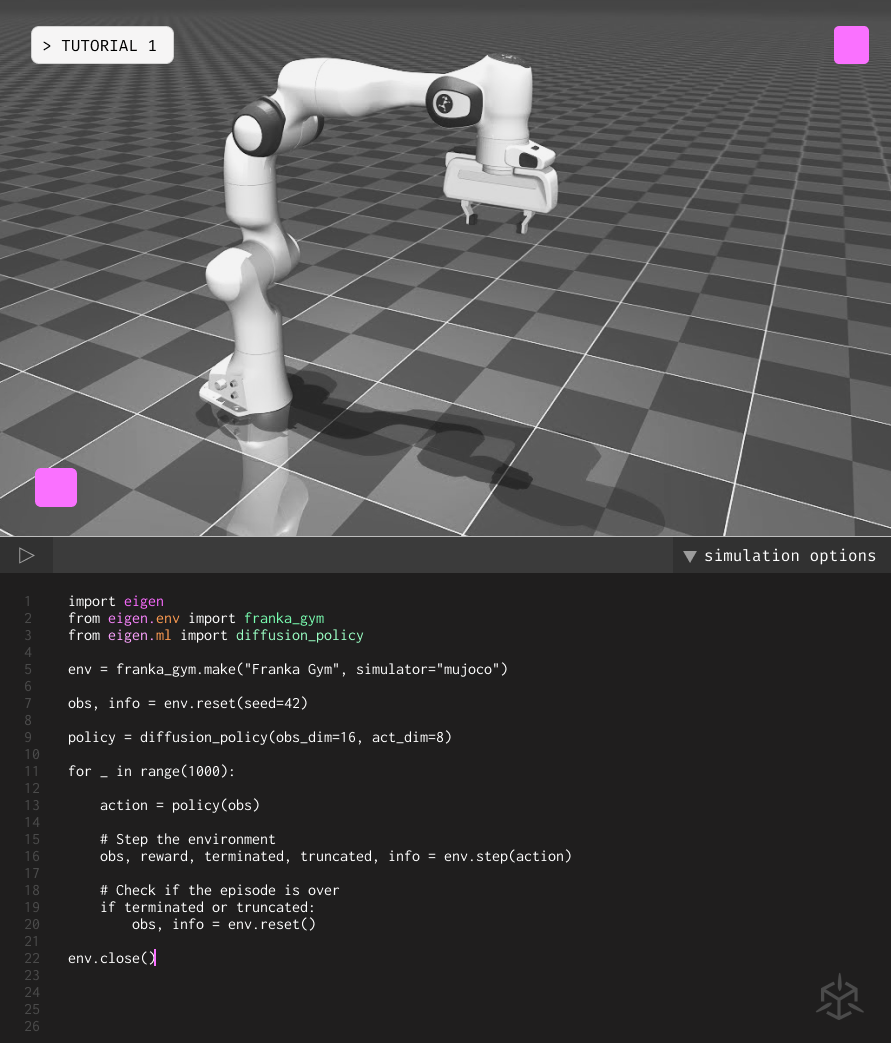
Control any robot, connect any sensor, instantly switch from sim to real. All in python.
Run the same code across MuJoCo, Genesis, and PyBullet — no rewrites, just toggle one config value
Orchestrate distributed robotics compute through a modular, node-based graph.
Seamlessly integrates data, training, and control in one continuous pipeline.
Robotics is growing more complex by the day — with new sensors, models, and control stacks emerging faster than teams can integrate them. Without the right infrastructure, development slows, costs surge, and innovation stalls. To break through the Robotics Complexity Wall, teams need an engine built for speed — one that unifies simulation, learning, and deployment into a single streamlined workflow. Eigen is that engine — designed to help modern teams move faster, outpace legacy systems, and deliver real-world impact.
Read our Whitepaper

Jupyter Notebook & Gymnasium
Bring your favorite ML tools — it just works.

Cross Embodiment Support
Connect to any robot and sensor

Multi-OS Compatibility
Run anywhere — macOS or Ubuntu.

GUI Toolkit
Build, debug, and deploy robotics pipelines through an interactive UI.
Sim-to-Sim & Sim-to-Real
Use one codebase for all testing and deployment
ROS Support
Continue using your existing ROS tools